
 Heim
Heim






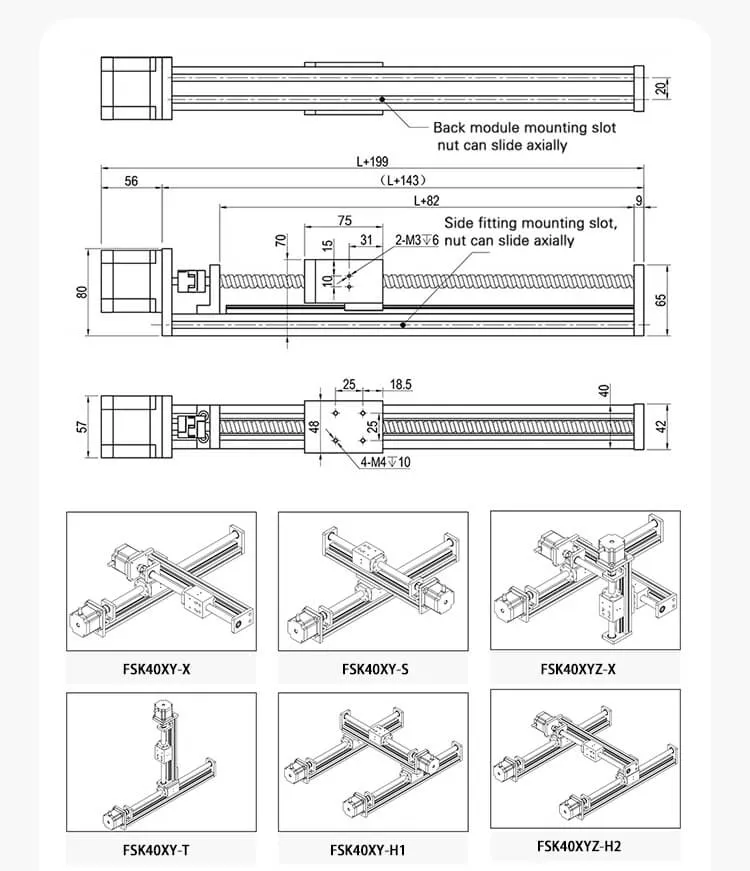
Vertikaler linearer Schienenführungs-Kugelumlaufspindeltisch mit motorisiertem Xyz-Tisch
Konstruktionsmerkmale Lineare bürstenlose Servomotoren für überragende Leistung und Langlebigkeit Anpassbare Z- und Thet
Senden Sie Ihre AnfrageBESCHREIBUNG
Basisinformation.
| Modell Nr. | FTS40XYZ-T |
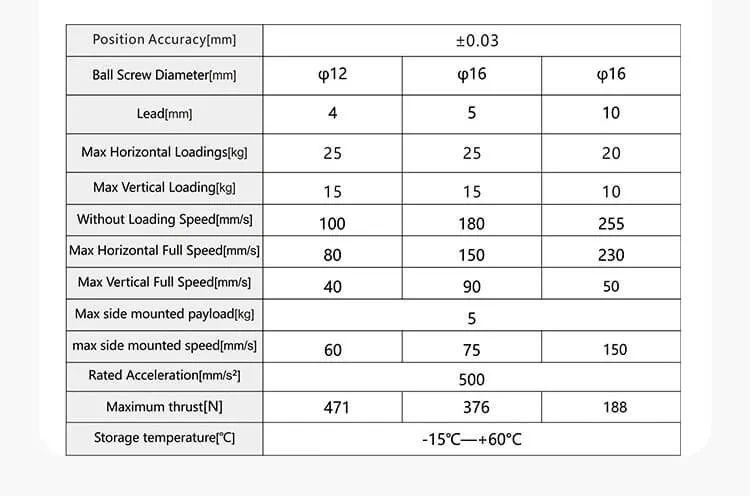
| Höchstgeschwindigkeit | 255 mm/s |
| Tragfähigkeit | 25kg |
| Positionsgenauigkeit | 0,03 mm |
| Hubbereich | 50mm-1000mm |
| Transportpaket | Schaum und Karton |
| Spezifikation | Aluminiumprofil |
| Warenzeichen | FUYU |
| Herkunft | China |
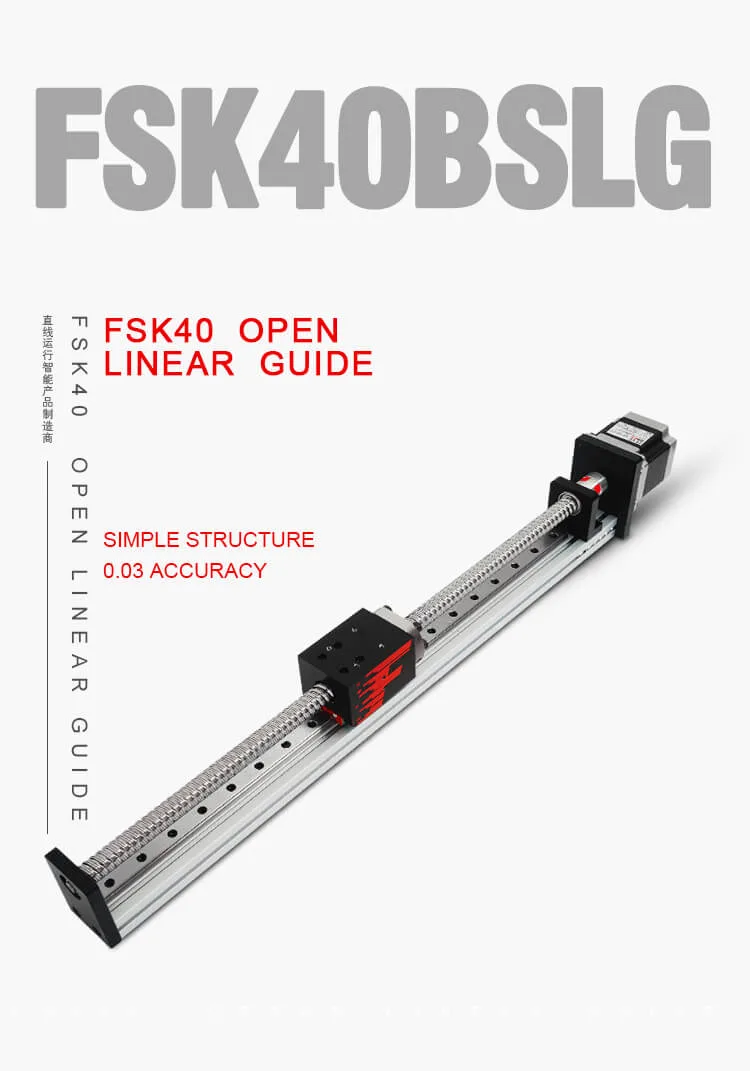
Produktbeschreibung
Design-Merkmale
Lineare bürstenlose Servomotoren für überragende Leistung und Langlebigkeit
Anpassbare Z- und Theta-Achsen für mehr Flexibilität
Optionaler Maschinensockel und Ständer
Optional chemisch Nickel für ESD-Schutz und medizinische Anwendungen
Das kompakte Design reduziert die Gesamtgröße der Maschine
Ideal für Die-Bonden, Drahtbonden, WLP und DNA-Profiling
Kartesische Portalsysteme nutzen die Kerntechnologien und umfangreichen Fertigungskapazitäten von Aerotech für Sie und bieten herausragende Leistung und Vielseitigkeit in einer Vielzahl von Automatisierungsplattformen. Lineare Positionierungssysteme sind für Anwendungen wie Hochgeschwindigkeits-Pick-and-Place, automatisierte Montage, visuelle Inspektion, Ausgabestationen und hochpräzise Inspektion konzipiert.


Als nationales High-Tech-Unternehmen wurden 82 geistige Eigentumsrechte genehmigt, darunter 6 Erfindungspatente, Gebrauchsmuster, Erscheinungspatente und 76 Software-Urheberrechte. Wir sind nach CE, FCC, RoHS, IP66, TÜV und ISO9001 zertifiziert.
Das Mehrachsen-Positionierungssystem kann aus mehreren Linearmodulen für individuelle Hub-, Präzisions-, Geschwindigkeits- und Tragfähigkeitsanforderungen bestehen. Sie werden häufig für medizinische Geräte, Automatisierungsproduktlinien, die Elektronikindustrie usw. verwendet.
Als Industriefabrik akzeptieren wir auch OEM. Sobald Sie das Maschinendesign vorgelegt haben, werden sich unsere Ingenieure innerhalb von 12 Stunden mit Ihnen in Verbindung setzen, um die beste Lösung für den linearen Portalroboter vorzuschlagen.
| Körperweit | Lead-Typ | Effizienter Schlaganfall | Positionsgenauigkeit | Tragfähigkeit | Geschwindigkeitsbereich | Servo-/Schrittmotor | Motion-Controller | Endschalter | Leistungs-/Treibermodell |



